

 联系我们
联系我们

汽车制造中的ABB人机交互指令之TPReadnum和TPReadFK
汽车制造行业已经在大规模的使用机器人进行生产制造,机器人按照预先设定好的程序轨迹移动,在实际生产制造车间中模具的更换、零部件批次的变化等等情况都会导致机器人程序需要调整,鉴于以上情况,很多机器人工程师在编程过程中很自然的加入了许多人机通信指令,当产生异常情况时机器人可以发出报警信息或者提示信息,提示维护人员检查设备某个特定部位或者生产人员输入要生产的信息,这样可以大大减少解决问题所需要的时间。上次和大家聊了一下TPWrite和Waituntil,今天我们来一起看看TPReaknum和TPReadFK。
在一个新的程序的起始阶段我们可以先使用TPWrite指令,提示生产人员机器人将要执行某段指令或者某个程序。然后加入TPReadnum指令,并写入英文 Which backrest should be produced。

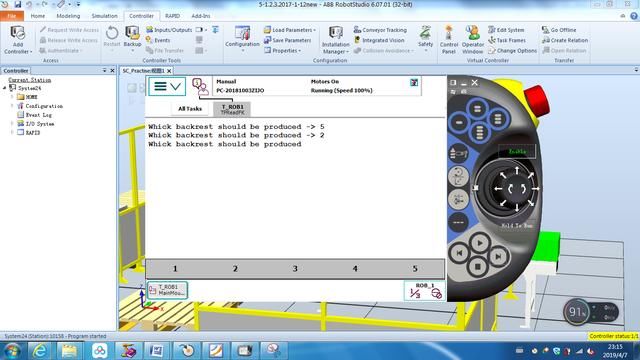
程序指针执行到这一条指令时示教器自动出现信息如下:
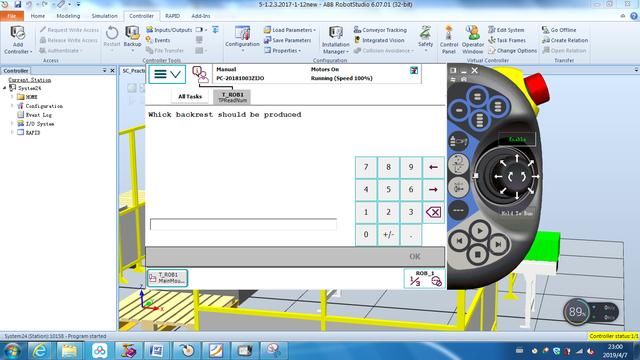
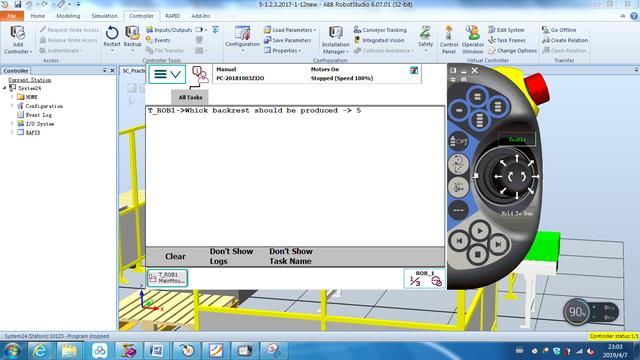
看到这个界面,生产操作人员可以输入数量,明确要生产第几个汽车座椅靠背。输入数量5输入完成点击OK,示教器显示新的信息表明机器人要生产五个汽车座椅靠背。
当然了TPReadnum这个指令还包含许多可选参数,比如说Maxtime,机器人等待时间超过设定的长时间之后机器人系统自动发出报警信息。
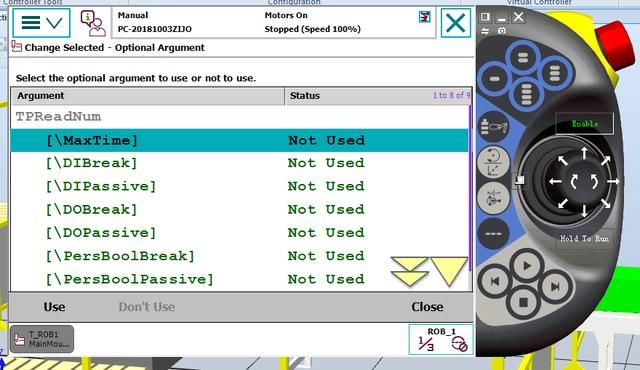
点击Use即可使用这个参数并且设定参数值。
说完TPRead,我们一起来看看TPReadFK,英文全程是 Flexpendant read function key。举个例子一共要生产五种汽车座椅靠背,每次生产靠背时需要生产人员明确要生产的是哪种配置的座椅靠背。编辑TPReadFK功能语句如下:
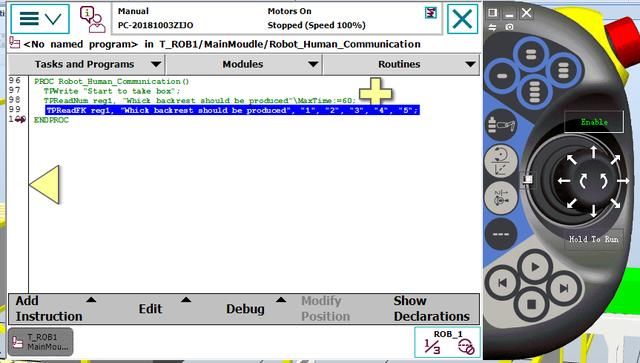
1到5分别代表一种配置的汽车座椅靠背。运行机器人程序,示教器出现如下界面:
可以选择生产某种配置的靠背
总结一下,TPRead和RPReadFK均需要生产操作人员输入信息,但是TPRead是直接输入数值,TPReadFK是提前设定好顶多五种选项,生产操作人员只能从五种选项中进行选择。
