

 联系我们
联系我们

技术领域
本发明涉及一种***动助推器机构,尤其是涉及一种适于在四极低压断路器的极上操作的***动助推器机构。
背景技术
已知在四极低压断路器中,由于断开/接通驱动机构相对于极组件的不对称布局而可能出现问题。的确,尽管对于三极断路器,断开/接通驱动机构通常与中心极相关联并且因此在其两个侧向侧上均具有对称的力分布,但是在四极低压断路器中存在不平衡的力分布,从而在驱动轴上产生屈曲/扭转问题并且在接通/断开操作期间在极之间招致不同的性能。
已经提出了不同的方案来解决或减轻该问题。
在US2007/0075808中,旨在防止驱动轴变形和/或校正其变形区域的“被驱动”单元插置在第四极(即,相对于断开/接通驱动机构不对称定位的那个极)与相邻的极之间。
然而,所提出的方案都不能完全令人满意,这是因为所述解决方案总是涉及具有机械联接件的相对复杂的机构,该机械联接件由于摩擦现象而产生能量损失。此外,断路器中所需的相对大量的部件和/或它们在某种程度上的复杂的组装和安装过程涉及相对较高的成本,从而增加了断路器的制造和组装成本。
发明内容
本发明的主要目的是提供一种四极低压断路器,其中解决或至少减少了上述问题。
因此,本发明的目标是提供一种辅助机构,特别是一种适于在四极低压断路器的极上操作的辅助机构,以便避免或至少减轻由于沿着主驱动轴及其部件的不平衡的力分布引起的问题。
本发明的另一个目标是提供一种辅助机构,特别是一种适于在四极低压断路器的极上操作的辅助机构,该辅助机构能够保证在接通/断开操作期间各个极的均一性能。
本发明的另一个目标是提供一种辅助机构,特别是一种适于在四极低压断路器的极上操作的辅助机构,该辅助机构能够避免或至少减轻在其接通/断开操作期间驱动轴上的屈曲/扭转问题。
本发明的又一个目标是提供一种辅助机构,特别是一种适于在四极低压断路器的极上操作的辅助机构,该辅助机构可以容易地以工业水平且以相对于现有技术方案具有竞争力的成本制造。
为了实现这些目标,本发明提供一种***动助推器机构,特别是一种适于在四极低压断路器的极上操作的***动助推器机构,所述极包括操作轴、至少一个固定触头和至少一个可动触头,所述可动触头可操作地联接到所述操作轴并且在所述断路器的断开/接通操作期间通过所述操作轴的旋转而能够与所述固定触头接合/脱离
在实践中,如下文中更好解释的那样,从能量的角度来看,助推器机构在其大部分运动期间都与操作轴完全分离,仅在需要时才从其提取能量。换句话说,在例如接通操作期间,助推器机构刚好在可动触头和固定触头彼此接合并且操作轴开始压紧动作之前开始从操作轴存储能量,但不会在其大部分动作期间从驱动机构提取能量。与现有技术的辅助机构不同,在利用本发明的助推器机构操作期间,基本上没有由于驱动机构和助推器机构之间的摩擦而造成能量损失,这是因为对于断开/接通操作的大部分而言该助推器机构基本上与驱动机构分离。
附图说明
图1是包括根据本发明的***动助推器机构的四极断路器的极和驱动机构组件的实施例的透视图;
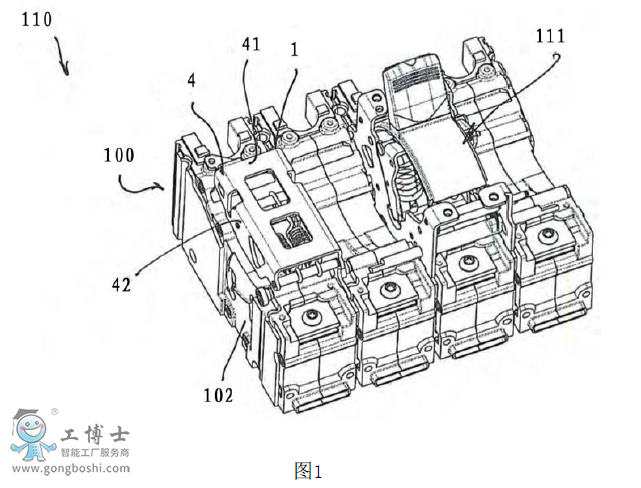
图2是包括根据本发明的***动助推器机构的四极断路器的极组件的实施例的透视图;

图3是包括根据本发明的***动助推器机构的极的实施例的透视图;

图4是极的示例性实施例的透视图,其中可以使用根据本发明的***动助推器机构;

图5是根据本发明的***动助推器机构的***实施例的***透视图;

图6是根据本发明的***动助推器机构的***实施例的第二透视图;

图7是在接通操作的***阶段期间的包括根据本发明的***动助推器机构的极的实施例的示意性侧视图;

图8是图7的极的操作轴的扭矩与位移(即,旋转)关系图;

图9是在接通操作的第二阶段期间的包括根据本发明的***动助推器机构的极的实施例的示意性侧视图;

图10是图9的极的操作轴的扭矩与位移(即,旋转)关系图;

图11是在断开操作的***阶段期间的包括根据本发明的***动助推器机构的极的实施例的示意性侧视图;

图12是图11的极的操作轴的扭矩与位移(即,旋转)关系图;

图13是在断开操作的第二阶段期间的包括根据本发明的***动助推器机构的极的实施例的示意性侧视图;

图14是图12的极的操作轴的扭矩与位移(即,旋转)关系图。

- 下一篇:分析ABB变频器控制柜的五大要素
- 上一篇:ABB高压断路器和隔离开关的区别
